
最近我的朋友夏先生介绍了一款他们自己正在研发的一款无人减震船,见下图,与以前无人船相比,它增加了悬挂减震系统(图中红框内)。

现有无人船大多属于中小型船舶,没有完善的减震减摇系统,减震减摇主要依靠舭龙骨(bilge keel,见下图)实现,舭龙骨可减小40%左右的横摇,而中小型船舶对横摇的阻尼特性较差,导致现有无人船的稳定性不高,水面作业受环境影响较大。

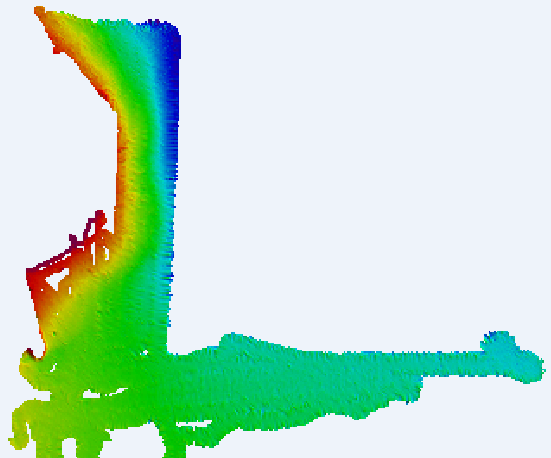
如果无人船只是用来监控或者采集水样,依靠舭龙骨的减震作用也够用,但是如果无人船用于多波束测量,不另加悬挂减震系统,效果则不是很理想。比如我们单位的大型无人船(6.5m长,2.6吨)即使在风平浪静的海湾里进行测量,多波束资料处理后生成的1-2m格网影像较差,只有5-10m格网影像效果不错。
测量场所——基岩小海湾

5-10m格网影像
因此,想要多波束测量效果好,要么将无人船做得更大,要么另加减震系统使得其上的平台摇晃频率更低,幅度更小。除了上面的减震系统,文后参考文献还提供了一个三级减震自稳系统的无人船设计方案,见下图。

当然,这种无人船无论叫减震无人船还是减震自稳无人船,名字都比较土,如果叫波浪自适应模块化无人艇(Wave Adaptive Modular Vessel)是不是显得高大上。下面介绍Marine Advanced Robotics公司(Ocean Power Technologies公司的子公司,官网地址为https://wam-v.com)的波浪自适应模块化无人艇,主打产品型号为WAM-V,见下图。

Marine Advanced Robotics公司设计的波浪自适应模块化无人艇采用了一种独特悬挂技术,从而在根本上提高了无人船的海面适应能力。与传统船只不同,波浪自适应模块化无人艇采用柔性的铰接与悬挂结构以顺应水面波动,从而保持平台的平稳与水平。其铰接系统使用了弹簧,消振器以及球形关节,充气浮筒可以有效实现缓冲,两个发动机吊舱则铰接在船体上,使螺旋桨始终保持在水中,进一步提高了波浪自适应模块化无人艇的稳定性和可控性。船身长与梁的长度比为2:1,连同铰接式悬挂系统,使波浪自适应模块化无人艇具有优异机动性和稳定性。

WAM-V有三个子型号分别是WAM-V8、WAM-V16和WAM-V22。WAM-V8适合于海湾和内陆水域,易携带,能被一辆皮卡装下。WAM-V16多用途,搭载不同设备,适合于中小型测量项目。WAM-V22主要用于海事预警,适用于大型测量项目。

WAM-V8正在测量

WAM-V16下水

WAM-V16正在测量

WAM-V MegaSwath型无人船被拖往测区。

WAM-V MegaSwath型无人船集群进行多波束测量。

WAM-V搭载无人机,无人机跟随无人船飞行


WAM-V无人船搭载水下潜航器。


由于采用了减震系统使得测量平台更加平稳,WAM-V无人船能进行多波束测量和搭载无人机监控海域,以后搭载重力仪进行重力测量的可行性也会大很多。
参考文献
https://www.wam-v.com/
https://www.xjishu.com/zhuanli/32/202222997835.html
https://www.xjishu.com/zhuanli/32/201910176571.html
https://www.sohu.com/a/483809594_120056227
https://www.ucl.ac.uk/mechanical-engineering/people/yuanchang-liu


发表评论: